What is it?Ever wanted to measure the distance to an object , person or wall? Sound consists of oscillating waves through a medium (such as air) with the pitch being determined by the closeness of those waves to each other, defined as the frequency. Ultrasonic sensors are designed to sense object proximity or range using ultrasound reflection, similar to radar, to calculate the time it takes to reflect ultrasound waves between the sensor and a solid object.
How it worksA basic ultrasonic sensor consists of one or more ultrasonic transmitters (basically speakers), a receiver, and a control circuit. The transmitters emit a high frequency ultrasonic sound, which bounce off any nearby solid objects. Some of that ultrasonic noise is reflected and detected by the receiver on the sensor. That return signal is then processed by the control circuit to calculate the time difference between the signal being transmitted and received. This time can subsequently be used, along with some clever math, to calculate the distance between the sensor and the reflecting object.
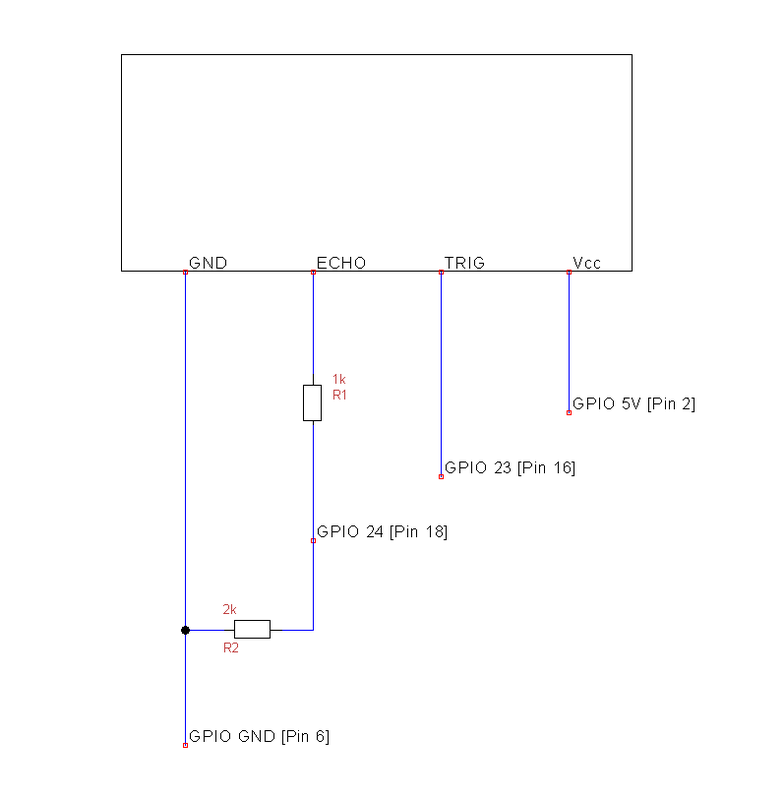
Fix it UpWiring up the Sensor is very simple, follow the diagram below and connect the pins as shown below. There are not additional libraries or software required by Raspberry Pi or Python to use the Sensor. Once the Pi boots up you are ready to start measuring the distance between the sensor and an object!
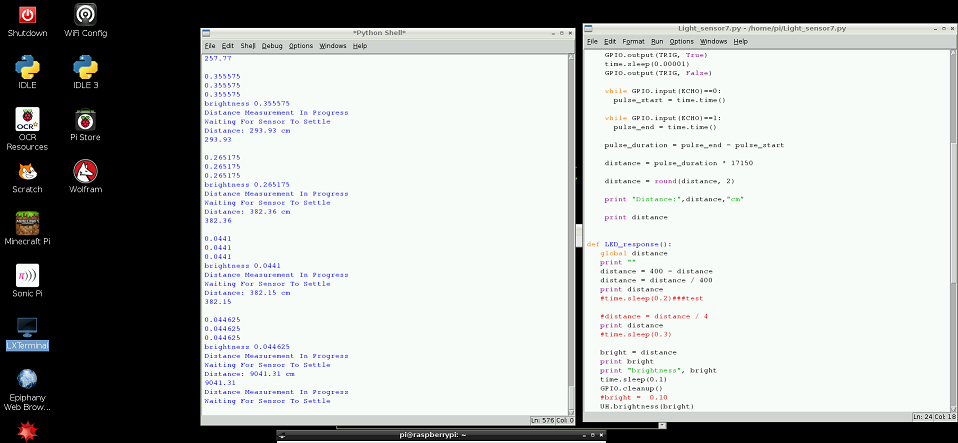
Test CodeSince the distance sensor requires no extra libraries to be installed it is fairly easy to get up and running. After you have connected the wires then reboot the Pi and create a new Python file adding the following code. Type sudo idle in the LX Terminal to ensure that IDLE is opened with administrative privileges.
|
Distance SensorStarter Codeimport RPi.GPIO as GPIO
import time GPIO.setmode(GPIO.BCM) TRIG = 23 ECHO = 24 print "Distance Measurement In Progress" GPIO.setup(TRIG,GPIO.OUT) GPIO.setup(ECHO,GPIO.IN) GPIO.output(TRIG, False) print "Waiting For Sensor To Settle" time.sleep(2) GPIO.output(TRIG, True) time.sleep(0.00001) GPIO.output(TRIG, False) while GPIO.input(ECHO)==0: pulse_start = time.time() while GPIO.input(ECHO)==1: pulse_end = time.time() pulse_duration = pulse_end - pulse_start distance = pulse_duration * 17150 distance = round(distance, 2) print "Distance:",distance,"cm" GPIO.cleanup() | ||||||
- Home
- Python
- Ras Pi
-
Pi Hardware
- Pi-Hacks
-
Pi-Hacks 2
- The Joker
- Hologram Machine
- Google Vision: Camera Tell
- Yoda Tweets
- Pi Phone
- Darth Beats
- Twitter Keyword Finder
- Crimbo Lights Hack
- Xmas Elf
- Halloween 2016
- Halloween Hack 2015
- Socrative Zombie
- Voice Translation
- The Blue-Who Finder
- GPIO, Twitter
- Pi Chat Bot >
- PiGlow & Email
- Pibrella Alarm System
- SMS with Python >
- Pi-Hacks 3
- Minecraft
- Computing
- Contact Me
- Random Hacks